Finalement ils sont là. La rumeur circulais depuis plusieurs mois à propos de ces PIC32MZ. Il s'agit des nouveaux MCU 32 bits avec un nouveau core, le MIPS MicroAptiv, plus performant que le M4K des PIC32MX. Il peuvent fonctionner jusqu'à 200Mhz, avoir 2Mo de Flash et 512Ko de RAM. C'est suffisant pour faire tourner un système GNU/Linux ou BSD unix. La frontière entre MCU et SoC devient de plus en plus floue. Je m'attendais à ce qu'ils soient multicore mais mes attentes sont déçues. Évidemment le prix est à l'avenant, le modèle le plus économique vaut 13,94CAN$ (PIC32MZ1024ECG064-I/PT) actuellement chez Digikey.ca
Il existe 2 starter kit au coût de 172CAN$. À ce prix je passe.
Autre découverte que j'ai faite aujourd’hui en furetant sur Microchip.com le PIC16F527. Je ne sais pas si c'est un petit nouveau ou un MCU qui avait échappé à mon attention jusque là mais le datasheet est daté du 2013-12-13.
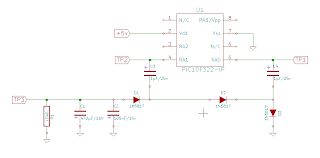
Ce qu'il a de spécial est ceci, il est de la famille des baseline mais la pile des retours à 4 niveaux au lieu de 2 et il supporte les interruptions avec sauvegarde automatique des registres W, STATUS, BSR et FSR. Mais sa plus grande particularité est qu'il contient 2 amplificateurs opérationnels.
Certains préfèrent les PIC
Y a t-il un autre manufacturier qui a une offre de produit aussi varié que Microchip en terme de MCU? Peut-être TI mais surement pas Atmel. Et à ma connaissance c'est le seul qui offre des MCU 32 bits en format DIP-14, DIP-20 et DIP-28. Si ce n'était de la popularité des carte Arduinos, je ne crois pas que les AVR auraient connue autant de succès. Voilà pourquoi ce blog s'appelle PICatout.